工控机CAN配置日志
省流:
逆天厂商无法给出CAN板的开发手册,其工作逻辑和数据处理方案完全不知,导致浪费时间一个个波特率去试,而且还试不出来。最终厂商也未能给出个最终说法。
因此购买了基于PCAN的收发板,与过往Orin代码完全兼容的折中办法。
CAN子板方案综述
一般市面上能购买的有以下三种
串口CAN(/dev/ttyS*)
串口一般就是COM口。串口可以从USB转串口(CH340芯片)得到,也可以从机内某些地方引出。
CAN收发芯片从串口得到数据后,会根据设定的模式去处理串口数据,反之同理。比如有透传(给串口的数据加一个固定的ID)、包模式(自己控制整个CAN帧的内容)、ModBus等等。比如下面的透传模式的示例图,这就很清晰明了要发什么数据了。
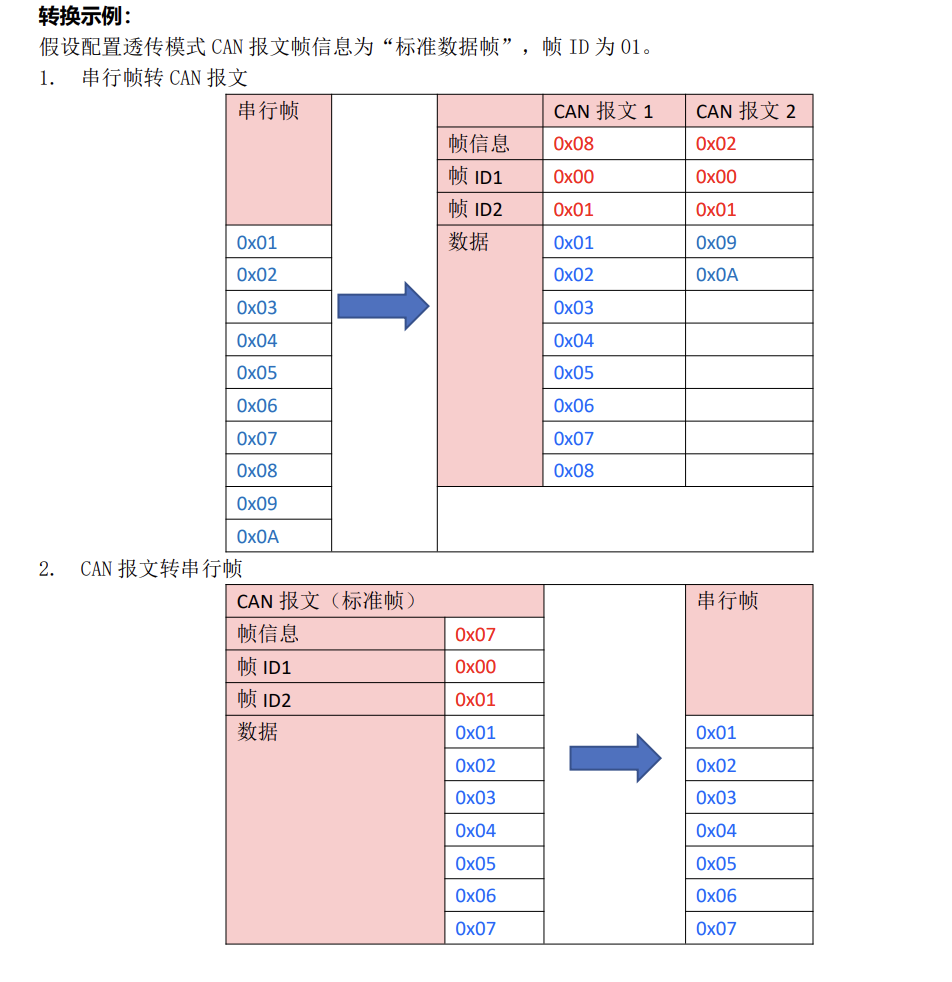
选型示例:泥人科技的USB-CAN。上面的手册就是它家的。结构实质上是CH340+CAN收发芯片。

好处:非常简单,你只用管串口就是了。如果是从零开始我觉得不错。前提是有好的文档。
缺点:CAN帧缓存小,比如上面那个只能缓存200帧,极限情况下如果堵车了,先进先出可能会丢数据(没听到过以前有这种情况)。
USB-CAN(/dev/USBCAN*)
顾名思义,这一个CAN设备直接是完全的USB设备,开发时也只要往物理USB设备丢数据。
选型示例:https://github.com/SOULDE-Studio/USB2CAN\_ROS?tab=readme-ov-file
好处:这个卖家提供了很多机器人、ROS的示例,看起来很可靠。
坏处:需要它的第三方库实现与设备的通信。
PCAN(can0、can-untils)
上赛季所用的方案。与socketCAN配合使用。因为本赛季逆天的工控机厂商,目前也打算采取这个办法。
最大的特点是直接能被识别到为can设备。很有安全感。
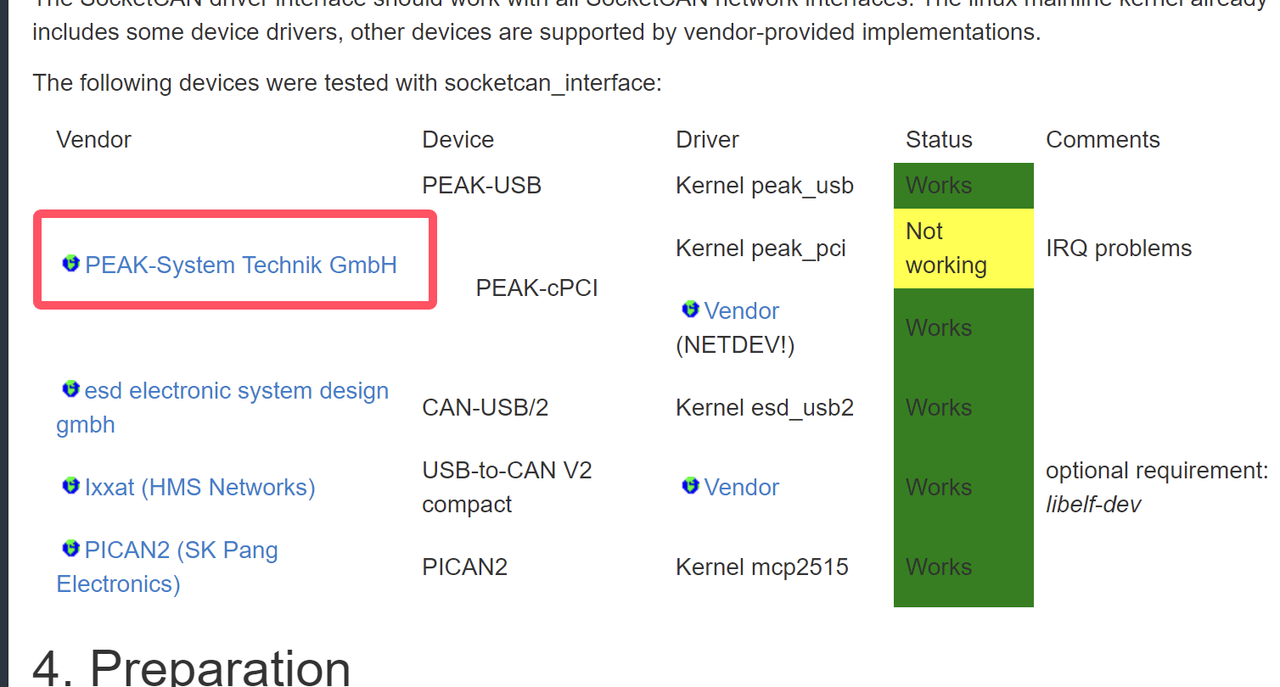
socketCAN是ROS官方的CAN功能包https://wiki.ros.org/socketcan\_interface?distro=noetic,需要特定厂商才能支持。其中,PCAN(也叫PEAK-CAN)就被支持。
选型示例:挺多的。注意需要带隔离的,不然按照24赛季主控哥的说法,总线芯片断电状态下会把整车can网络拉低(电压降低。虽然CAN网络依靠压差来运行,具备一定的抗干扰能力)

好处:与Orin代码完全兼容(理论上)
坏处:得有socketCAN的基础
背景
2025赛季更换为X86架构的工控机,CAN实现方案与Orin基本不同。
Orin CAN方案回顾
硬件
Orin的方案如下图,注意收发板,它的功能是转换为CAN H和CAN L,正是因为这个用杜邦线的板子稳定性始终是个雷,你有时候会发现主控报无人设备断联,大部分是这个原因。
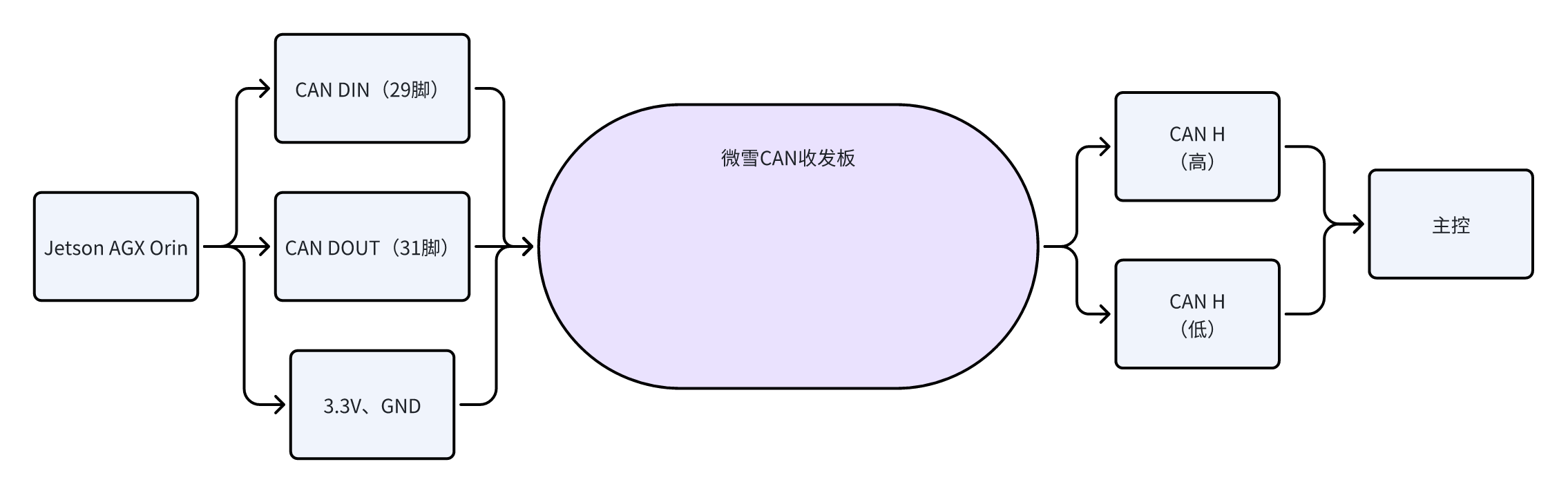
在Linux下,一般can设备是归入到以太网管理的。在内核启动CAN相关模块后,就可以通过socketCAN(一个
ROS包)来向实体CAN设备通信了。
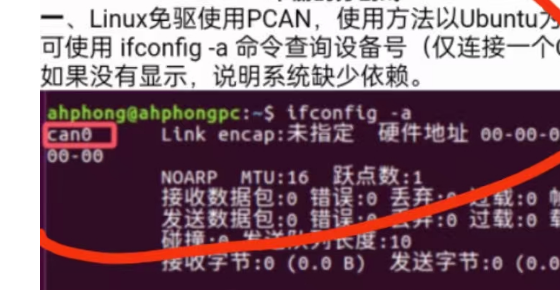
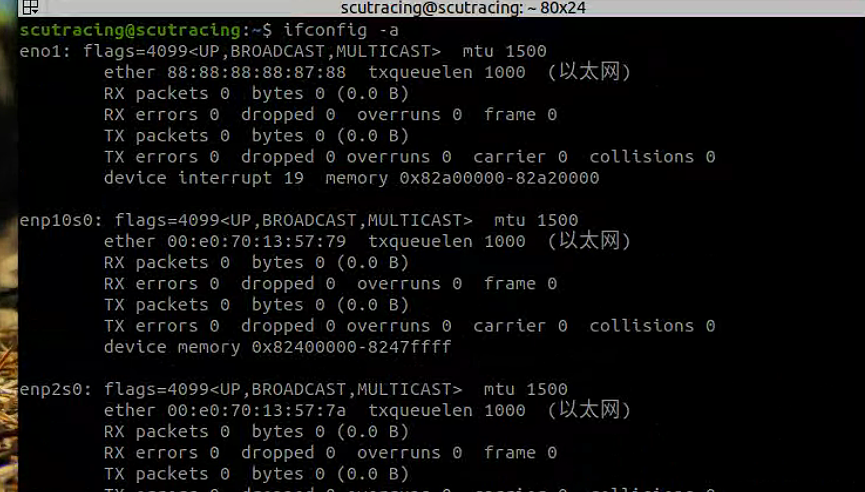
但在新工控机上,你会发现输入ifconfig -a,一个CAN设备都找不到。
软件
再介绍一下CANBus下的功能包。
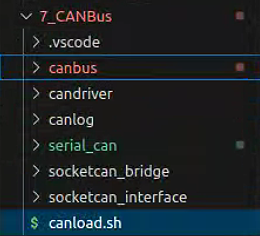
canbus负责CAN帧的打包,将控制指令打包后发送到话题/sent_messages;也接收/receive_messages,负责CAN帧的解析,再把从主控收到的AMI指令发到 /res_and_ami_data,这样就知道我们按车上选模式是几了。
candriver是23赛季USB-CAN用的(也就是红CAN,也叫CAN分析仪),不用管它。
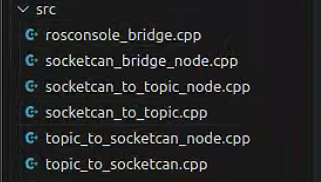
socketcan_bridge是负责ROS域与CAN设备的部分。接收/sent_message后就往CAN硬件发送了,也就是topic_to_socketcan,很直白明了吧。反之,收到CAN硬件的CAN帧后,就发到话题/receive_messages,也就是socketcan_to_topic
canload.sh是开机自启动,设置CAN设备用的,形如sudo ip link set can0 type can bitrate 500000这样的命令,就是对can0这样的硬件做更改。
很遗憾,上面除了canbus,其他东西在新工控机都没用了。新工控机连can0这样的设备都找不到,何谈用can相关的指令和包。
CANBUS中对从主控接收到的大量信息进行了处理,但其实真正有处理的不多。比如id859,856,535,537在Canbus中进行处理,但receive message里面找不到。
真正用到的只有AMI选任务517。
新工控机CAN方案
还记得上面说的收发板吗,这玩意现在内置到工控机里面了。
在工控机的机身上,有着两个CAN接口,它的外形是DB9,也叫RS232/RS485,它形状怎么样不要紧,因为它里面有两根针,就是CAN H和CAN L。只要这两根针接到主控,搞定。

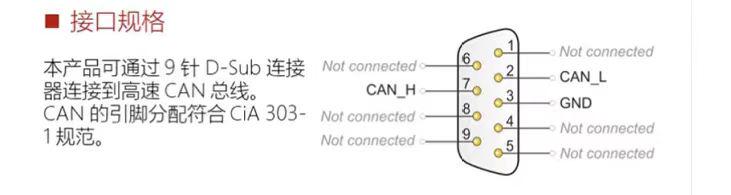
那为什么你在新工控机上找不到CAN设备?因为这个机内的收发板与工控机是通过串口连接的,你只要往串口发CAN帧的16进制内容,收发板就会转换为CAN信号,通过那两根针出去。
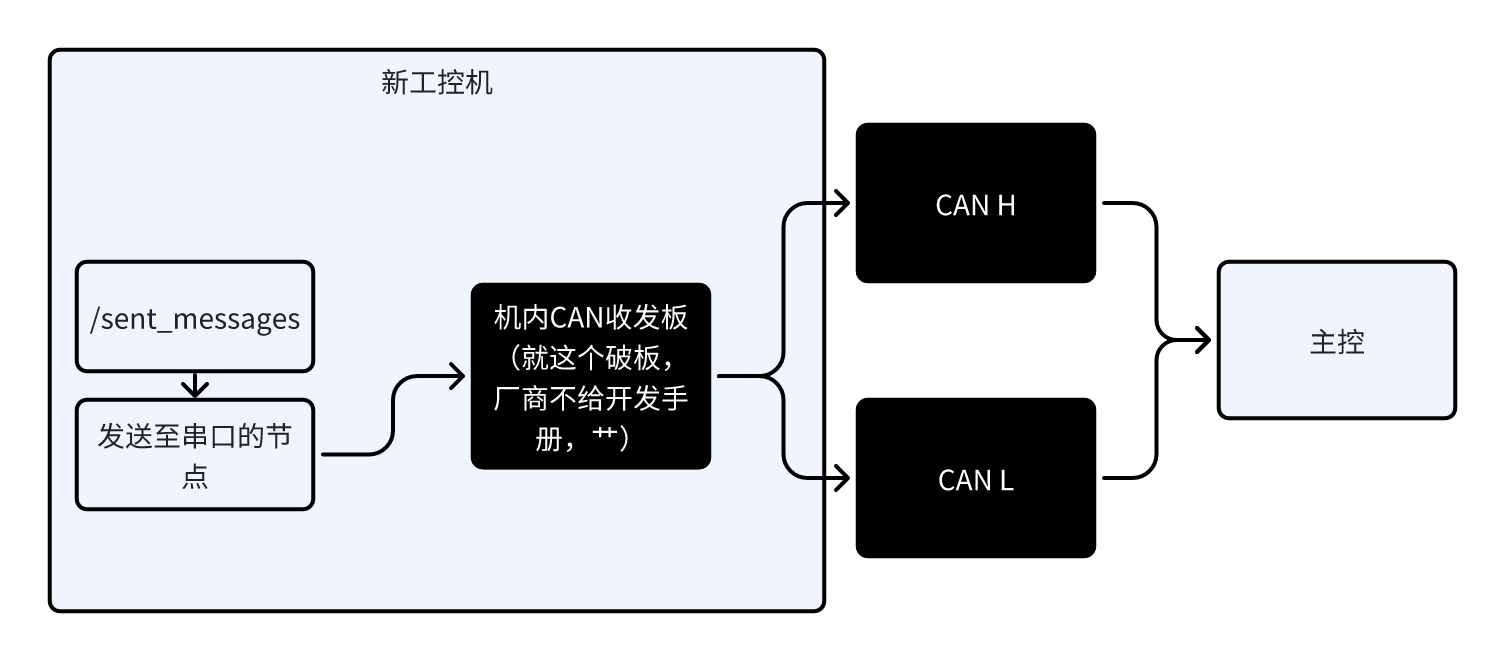
很简单的原理,结果被这个黑盒子一样的收发板搞得一坨。
CAN知识补充
CAN包括标准帧和拓展帧,我们的数据量只用到标准帧
标准帧里我们能动的有11bit数据,这里面2bit是高低位ID,比如id=774(十进制)转换十六进制是0x306,那么这两bit就是03 06;1bit是DLC,说明后面数据的长度,比如08就是后面有8bit的数据;最后8bit就是数据了。总结:11=2+1+8
高低位ID涉及到CAN中的仲裁,ID越小优先级越高。
(其余待补充)
新工控机CAN配置日志
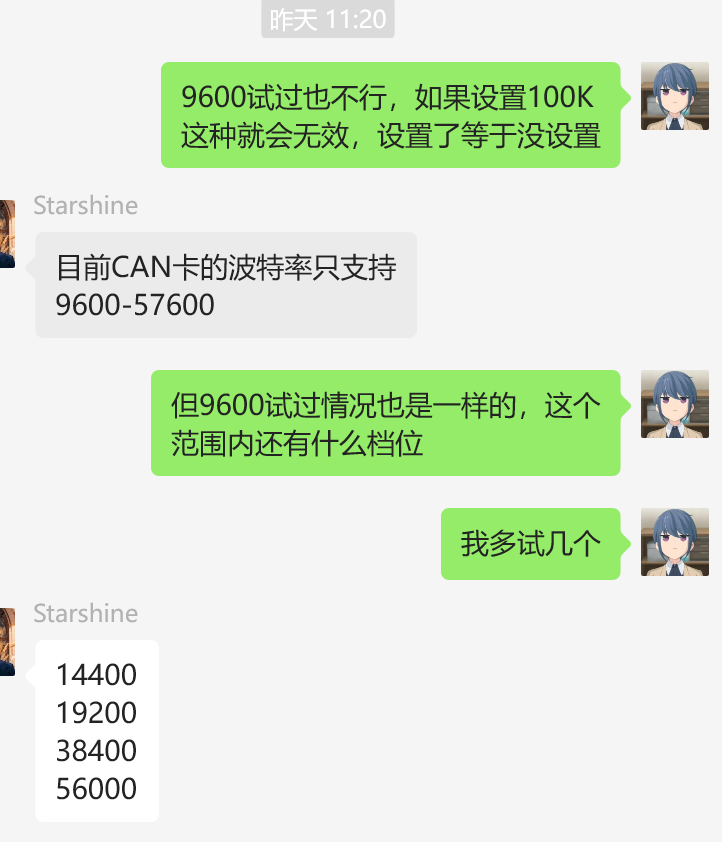
完成serial_send.cpp节点,它会订阅/sent_messages然后发到串口/dev/ttyS4(对应COM5,即CAN1)也就完成了控制数据发送到串口这一步。这里可设置的有:只发送8位数据,或是按照上面说的发11位数据;然后是波特率设置,只能在9600-57600,后面我用了19200
完成serial_receive节点,会从/dev/ttyS4接收CAN数据,然后按ID分类发送到/receive_messages。
问题1:工控机发送到CAN收发仪(红CAN)得到的数据为空,红CAN发送到工控机会产生一大堆垃圾
猜想1:这DB9的CAN线线序对吗?
验证:两个红CAN通过这根线去收发,一切正常
猜想2:工控机输出的CAN帧有问题
验证:工控机两个CAN相连,CAN1发,CAN2接收,居然也正常,我草。

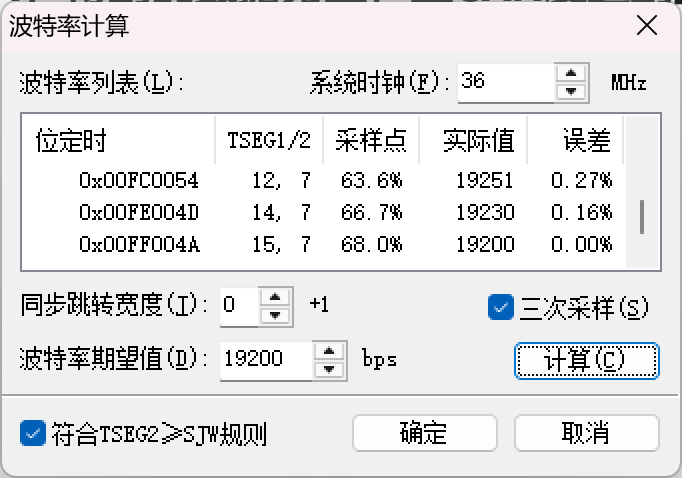
猜想3:CAN接口出来的波特率,按照厂商说的是19200,但是红CAN只能选择10K或者20K,是否有影响
验证:自定义波特率,需要计算十六进制。选择0x00FF004A,但问题依旧;两红CAN都设置19200,通讯正常。

猜想4:CAN与串口之间可以是19200,但是CAN接口到CAN分析仪明显不能这么低的波特率。
验证:分析仪逐挡更改波特率,比如常用的500K和1000K,问题依旧。
情况就是,波特率为19200时,分析仪发送给工控机发送一帧,id=00 03,数据为00 01 02 03 04 05 06 07,工控机串口会收到142帧相同的帧,id=0x1047,数据是10 50 64 0C 00 00 00 00;
波特率为500K等时,发送一帧,工控机会收到几十帧ID和数据都不同的帧。